最近,在与传感技术相关的工业制造设备领域,有哪些最新应用呢?来看看以下三则简讯。

机器人安全气囊,资料图
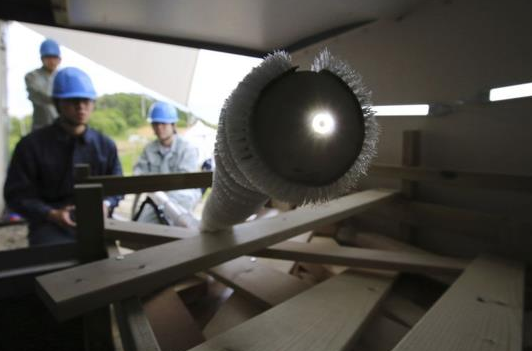
1.新型机器人安全气囊:内置压力传感器 让人机工作更安全
让机器人与人类一起安全地并肩工作是制造业面临的重要而且不可避免的挑战。如果机器人出现问题,结果可能不仅仅是延迟生产,而且可能会伤害人类。为了防范这种不幸事件,德国DLR机器人和机电一体化中心的研究人员一直在推出安全可靠的措施:机器人安全气囊。
科学家从2016年开始研发,并于最近发布了一个新的视频,展示了这项技术如何在一个协作任务中工作。视频显示,安全气囊围绕着机器人的操纵器工具及其锋利的边缘,当手臂移动时自动充气以保护附近的人类。

研发人员与机器人安全气囊,资料图
据介绍,当机器人需要使用机械手臂时,安全气囊会在不到一秒的时间内放气。内置的灯可提醒附近的人们机器是否安全,内置的压力传感器,则会检测到它是否碰到任何人。
像这样的安全气囊,只是确保工业机器人与人类安全并肩工作一个选择。目前,机载传感器和摄像机用于帮助机器人检测附近的人类工作者,机器通常配备有力限关节,可检测何时对其运动有太大阻力并自动关闭。
日本蛇形机器人,资料图
2.日本研发出蛇形机器人 可探查复杂管道内部
据日媒报道,8月29日,日本京都大学、金泽大学和冈山大学等的研究小组宣布,已开发出可在复杂弯曲的管道中蜿蜒前行实施调查的蛇型机器人。
据报道,该机器人全长约2米,重约9公斤。搭载了高性能传感器,可通过复杂的管道内部。由于使用回声确定当前位置,操作中不会迷失方向。
随着机器人的行进,操作画面将显示管道的图形,还可看见顶端摄像头拍摄的影像,能够收集详细信息。此外从瓦砾上通过时,还能像蛇一样缠绕很细的管道外侧向上攀爬。
研究小组称,除工厂的日常检查外,该机器人还有望用于灾害时因危险导致人不能进入的建筑内部探查,以及福岛核事故的反应堆报废作业。此外,今后,技术人员还将改良,让其可防水防尘,实现实用化。

限位开关改造示意图,资料图
3.采煤机通过改造限位开关装置防止过度牵引
前不久,神东煤炭集团公司石圪台煤矿综采二队在井下工作面对采煤机限位装置进行了改造,在两端头对采煤机进行了限位,规范了采煤机的运行。
以前,综采工作面采煤机运行至两端头时,易出现因过度牵引造成采煤机及运输机端头设备损坏的情况。常规的采煤机限位装置为机械式限位块,利用螺栓安装在运输机两端头处销排上,机械式限位块对采煤机限位是靠强制阻挡强迫其停止的,所以冲击力较大,如果限位块被挤坏后就会掉入运输机,跟随运输机进入了运输系统,造成安全隐患。
针对该问题,综采二队员工设计了电控式限位开关。该电控开关利用限位开关,通过控制采煤机先导实现对采煤机过度牵引的控制。同时,为保证该装置运行稳定,该队还铺设了控制台组合开关至工作面的通讯电缆,用于实现限位开关和组合开关的通讯控制。在组合开关中,将采煤机先导点与限位开关常闭点连接。采煤机运行至端头过度牵引时即会触动限位开关,断开采煤机先导回路,停止采煤机牵引。
 鲁公网安备 37030402000332号
鲁公网安备 37030402000332号